Courte histoire
de l'IA
- Master Informatique -
Université du Havre
Survol historique

Des premiers propos - 1948
En réponse à une présentation lors d'un congrés comme quoi il était impossibe qu'une machine pense.“You insist that there is something a machine cannot do. If you will tell me precisely what it is that a machine cannot do, then I can always make a machine which will do just that!”Référence à la thèse de Church-Turing.
Von Newman
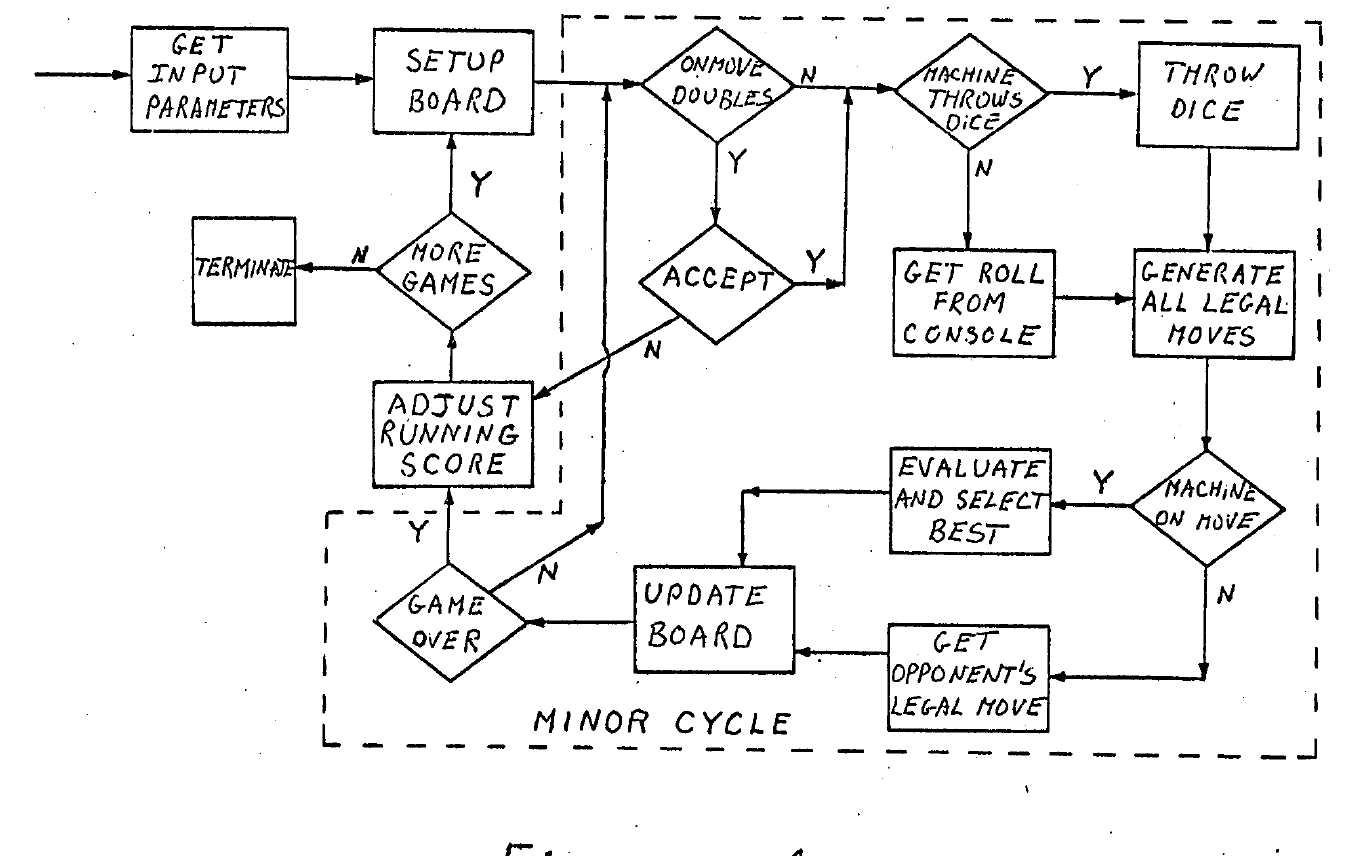
Un début discret - 1949
- Claude Shannon exprime comment un ordinateur pourrait jouer aux échecs
“The chess machine is an ideal one to start with, since: (1) the problem is sharply defined both in allowed operations (the moves) and in the ultimate goal (checkmate); (2) it is neither so simple as to be trivial nor too difficult for satisfactory solution; (3) chess is generally considered to require ‘thinking’ for skillful play; a solution of this problem will force us either to admit the possibility of a mechanized thinking or to further restrict our concept of ‘thinking’; (4) the discrete structure of chess fits well into the digital nature of modern computers. … It is clear then that the problem is not that of designing a machine to play perfect chess (which is quite impractical) nor one which merely plays legal chess (which is trivial). We would like to play a skillful game, perhaps comparable to that of a good human player.”
Un début discret - 1949
- Basée sur des états ;
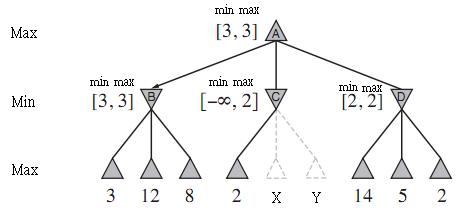
- Idée de Shannon : Minimax (Th. Von Neumann 1928) ;
- Basée sur une exploration exhaustive ;
- Arbre de jeu ;
- Fonction d'évaluation.
Problème : explosion combinatoire
Le test de Turing - 1950
- Jeu de l'imitation, nom : test de Turing inventé par A.C. Clarke 2001 l'Odyssée de l'espace ;
- A rapprocher de la cinquième partie du Discours de la méthode de Descartes :
- Imaginons un automate fabriqué par un artisan doué d'une habileté supérieure, et imitant parfaitement l'apparence et le comportement d'un être humain ; nous aurions toujours, soutient Descartes, deux moyens de ne pas confondre cet automate avec un homme véritable : la parole et l'action réfléchie.
- Présenté et discuté ailleurs dans le cours.
TuroChamp - 1951
- Programme proposé par Alan Turing ;
- Considéré comme le premier programme de jeu d'échec ;
- Non implanté à l'époque car nécessitant trop de mémoire ;
- Turing l'a exécuté manuellement et
il a perdu !

Georgetown-IBM expérience - 1954
- Traduction automatique ;
- 60 phrases en russe vers l'anglais ;
- Approche lexicographique ;
- Mi pyeryedayem mislyi posryedstvom ryechyi. We transmit thoughts by means of speech. Nous transmettons des pensées par la parole.
La naissance de l'IA - 1956
- Congrès de Datmouth ;
- Organisé par Marvin Minsky, John McCarthy, Claude Shannon et Nathan Rochester ;
- Participants : Ray Solomonoff, Oliver Selfridge, Trenchard More, Arthur Samuel, Allen Newell et Herbert A. Simon ;
- Démonstration par Newell et Simon de "Logic Theorist" ;
- McCarthy propose "Artificial Intelligence" comme nom du champ scientifique.
“Every aspect of learning or any other feature of intelligence can be so precisely described that a machine can be made to simulate it.”
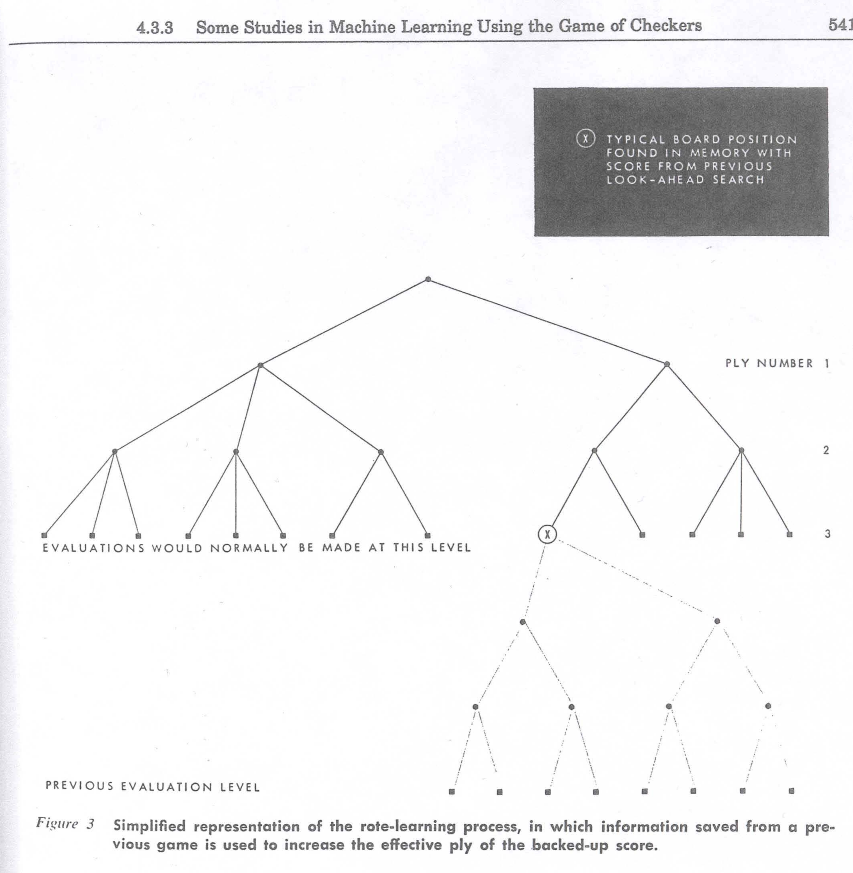
La théorie devient du code - 1956
- Idée de Samuel : l'apprentissage ;
- Basé sur Minimax ;
- Le programme devient meilleur au fil du temps sans intervention humaine,
- "Rote-learning" (par coeur), stocke les valeurs de certaines positions précédemment évaluée avec Minimax ;
- "Apprentissage par la généralisation", modif de la fonction d'évaluation en fonction de résultat d'ancienne partie.
Logic theorist - 1956
- Allen Newell, Hebert A. Simon et Cliff Shaw ;
- Construction d'un arbre de recherche ;
- Démonstration de thèorème ;
- A démontré 38 des 52 théorèmes de "Principia Mathématica (ch2)" ;
- A fourni une démonstration plus élégante d'un des théorèmes" ;
- Allen Newell, Hebert A. Simon et Cliff Shaw ;
- Basé sur les clauses de Horn, logique des prédicats ;
- Notion d'heuristique ;
- Proche des systèmes de production, préfigure les systèmes experts.
General Problem Solver - 1957
Programmation symbolique - 1958
- LISP (LISt Processing) - McCarthy ;
- Langage d'abord fonctionnel ;
- Basé sur le lambda calcul ;
- Syntaxe parenthésée sous forme de S-expression ;
- Permet la métaprogrammation, programmes qui se modifient ;
(defun factorial (n)
(if (= n 0) 1
(* n (factorial (- n 1)))))
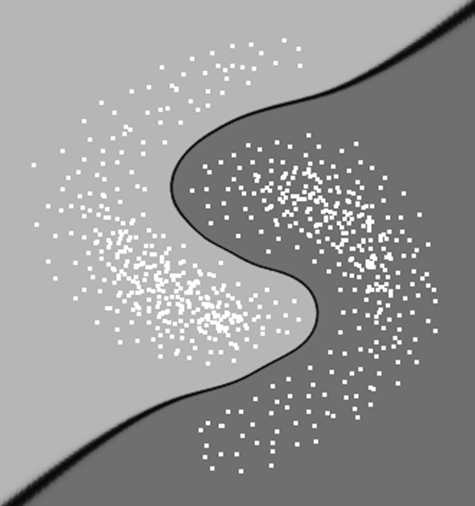
Réseau de neurones - 1958
- Le perceptron - Frank Rosenblat à partir des travaux de McCulloch et Pitts + Hebbs ;
- Inspiré du système visuel ;
- Capable d'apprentissage par correction d'erreur en modifiant les poids des signaux ;
- En 69 Minsky et Papert montrent que le perceptron ne peut pas faire de OU exclusif ;
- => Pas de pb non linéaire ;
- Oublié jusqu'en 1982, renaît avec Hopfield.
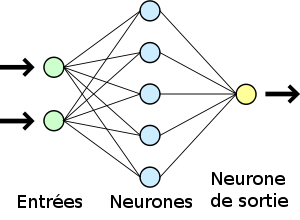
- une couche de cellules d’association, neurones formels ;
- Une couche d’unités sensorielles ;
- une couche de cellules de décisions, sortie du perceptron.
Les programmes commencent à gagner - 1958
- Performance modeste ;
- Gagne face à des débutants ;
- Amélioration de MiniMax avec la coupure alpha/beta ;
- Permet d'augmenter la profondeur de recherche.
Geometry theorem proving machine - 1959
- Herbert Gelernter (IBM) ;
- Fonctionnement en arrière, on part du but et on remonte ;
- Première démonstration géométrique considérée comme plus élégante que celles des manuels scolaires ;
- Abandonné par IBM.
« Dans un triangle, l’angle B est égal à l’angle C. Démontrez que le côté AB est égal au côté BC »
Démonstration non pas en considérant les deux sous-triangles découpés par la hauteur
« Considérons les triangles ABC et ACB : ces deux triangles sont semblables et possèdent des côtés correspondants BC et CB égaux. Ils sont donc égaux et AB est en conséquence égal à BC »
Démonstration non pas en considérant les deux sous-triangles découpés par la hauteur
« Considérons les triangles ABC et ACB : ces deux triangles sont semblables et possèdent des côtés correspondants BC et CB égaux. Ils sont donc égaux et AB est en conséquence égal à BC »
Intégration - 1961
- Utilise la méthodologie de Logic Theorist ;
- Exploration d'arbres ET/OU ;
- Donnera naissance à MACSYMA (69), puis Maxima ou Mathematica.
Algorithme d'unification - 1965
- Généralise le modus ponens ;
- Robinson ;
- Règle d'inférence utilisée en logique du premier ordre ;
- Utilisé par Prolog.
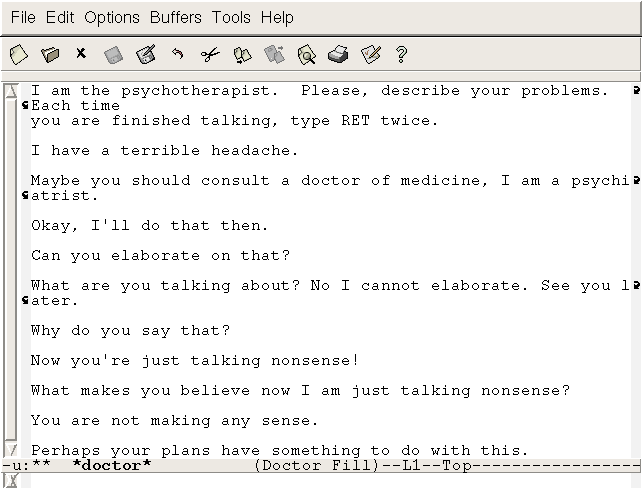
ELIZA - 1965
- Joseph Weizenbaum ;
- Simule un psychothérapeute rogérien ;
- Reformule les affirmations en questions.
Dendral - 1965
- Edward Feigenbaum, Bruce Buchanan, Joshua Lederberg (médecin) et Carl Djerassi (chimiste) ;
- Premier système expert ;
- Identification des constituants chimiques d'un matériau à partir de spectrométrie de masse et de résonance magnétique nucléaire ;
- Écrit en LISP ;
- La première version mélangeait connaissance et traitement ;
- Ensuite META-Dendral.
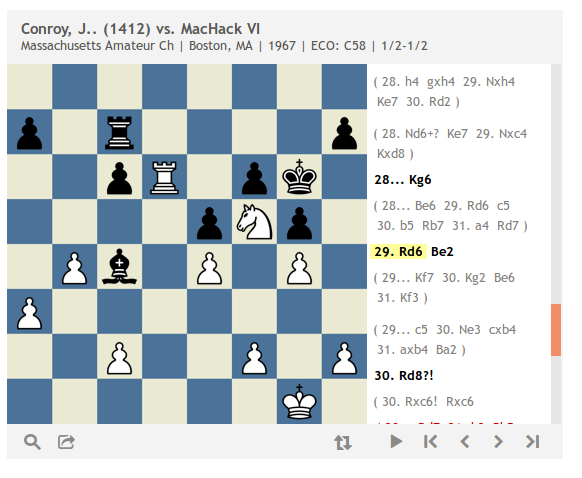
Mac Hack - 1968
- Richard D. Greenblatt MIT ;
- Machine-Aided Cognition ;
- Premier programme d'échec à jouer dans des tournois (humains) ;
- Premier à avoir un classement ;
- Premier à gagner en tournoi contre des joueurs classés.
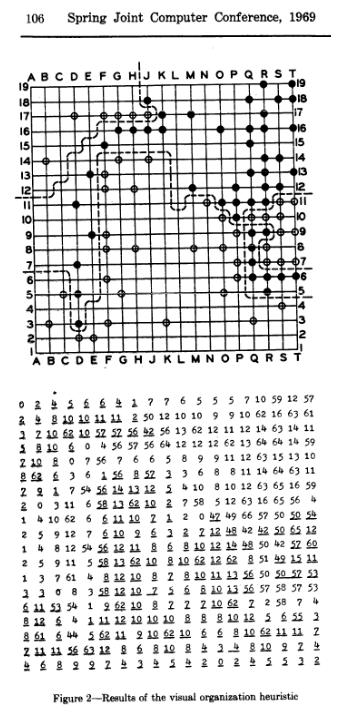
Le tour du Go - 1968
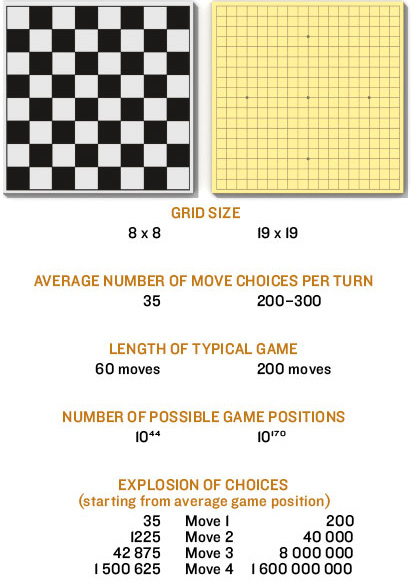
Jeu de GO - 1968
- Difficile d'utiliser un arbre de recherche (explosion combinatoire) ;
- Représentation proche de celle d'un joueur ;
- Recherche de forme ;
- Utilisation d'une fonction de hachage ;
- Idée d'Alfred Zobrist dans son PhD.
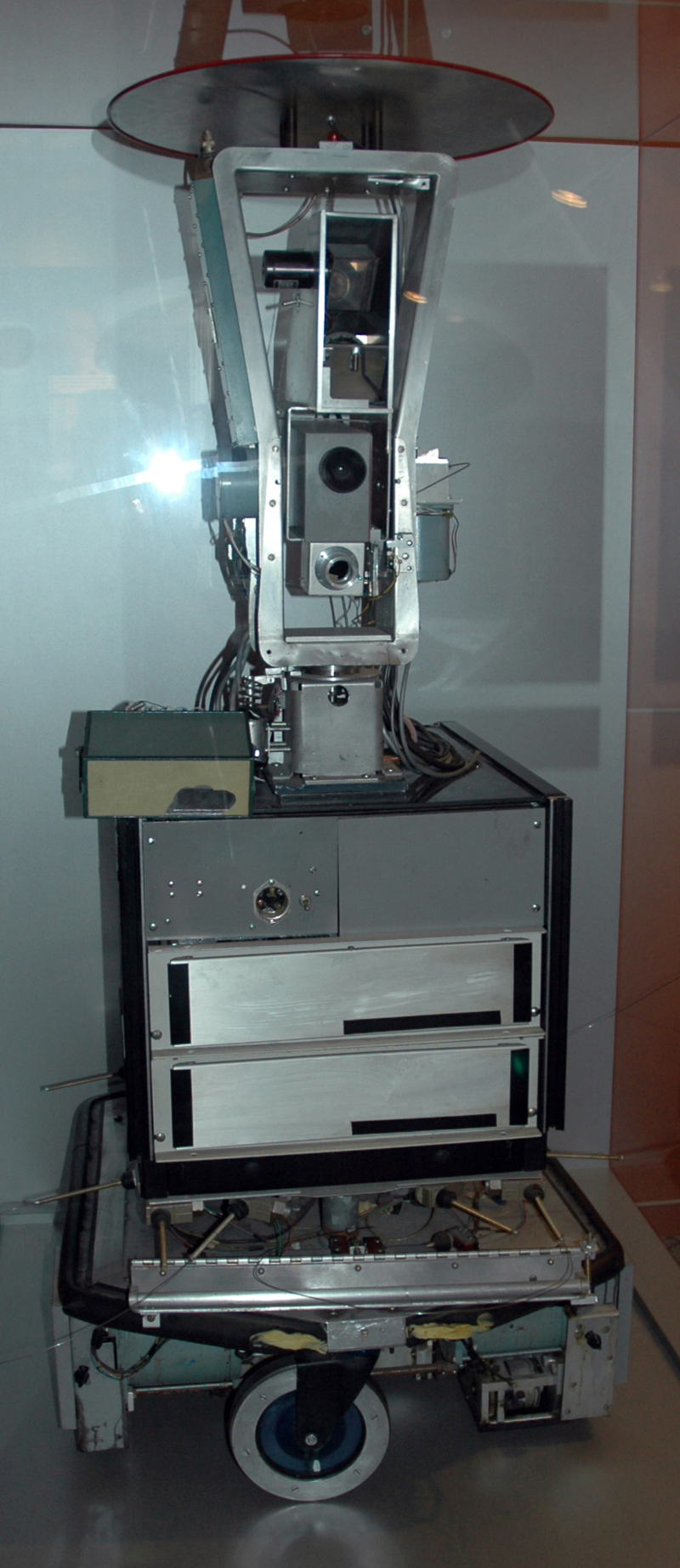
Shakey the robot - 1969
- Premier robot capable de raisonner sur ses actions ;
- Transformée de Hough (reconnaissance de ligne) ;
- Algorithme A* ;
- Graphe de visibilité (sommets accessibles).
Publication de perceptrons - 1969
- Marvin Minsky et Seymour Papert ;
- Démontre l'intérêt du perceptron ;
- MAIS montre que l’algorithme du perceptron ne converge que si les classes sont linéairement séparables ;
- Annonce l'hiver de l'IA jusqu'en ~ 80
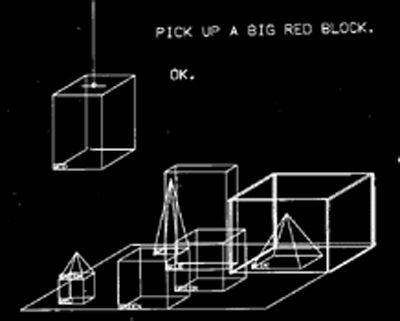
SHRDLU et les micro-mondes - 1970
- Un des premiers programmes informatiques de compréhension du langage naturel ;
- Terry Winograd au MIT ;
- Écrit en Micro Planner et en Lisp ;
- Monde des blocs ;
Personne : Prends un gros bloc rouge.
SHRDLU : OK.
Personne : Attrape la pyramide.
SHRDLU : Je ne comprends pas de quelle pyramide
vous parlez.
Personne (changeant d’avis) : Trouve un bloc
plus grand que celui que tu tiens et mets-le dans la boîte.
SHRDLU : Par « le », je suppose que vous voulez dire
« le bloc plus grand que celui que je tiens ».
SHRDLU : OK.
Personne : Que contient la boîte ?
SHRDLU : La pyramide bleue et le bloc.
Prolog - 1972
- A. Colmerauer et P. Roussel, Marseille ;
- PROgrammation LOGique ;
- Basé sur le calcul des prédicats du premier ordre ;
- Unification, récursivité et retour sur trace ;
- Négation (plus tard).
parent(jorge, andres).
parent(andres, felipe).
grandparent(X,Y) :- parent(X, Z), parent(Z, Y).
? grandparent(jorge,_).
%true
%il y a assez d'information pour dire
%que jorge a un grandparent connu.
%Hypothèse du monde clos → il n'y a pas assez d'information
%pour arriver à une conclusion -> false
? grandparent(andres,_).
%false
%Négation par l'échec appuyé sur l'hypothèse du monde clos
? not(grandparent(andres,_)).
%true
MYCIN - 1974
- Ted Shortliffe ;
- Système expert à base de règle en présence d'incertain ;
- Coefficients de vraissemblance ;
- Donnait dans 69% des cas la bonne thérapie ;
- Meilleurs résultats que les experts du domaine.
$$
{\displaystyle CF(x,y)={\begin{cases}X+Y-XY\ \ \ X,Y>0\\X+Y+XY\ \ \ X,Y<0\\(X+Y)/(1-min(|X|,|Y|))\ \ \ sinon\end{cases}}}
$$
Hans Berliner ;
Utilise la logique floue ;
La victoire 7-1 était due à en partie de la chance ;
BKG

Machine LISP
Neurone de Hopfield
Société de l'esprit
Architecture de subsomption
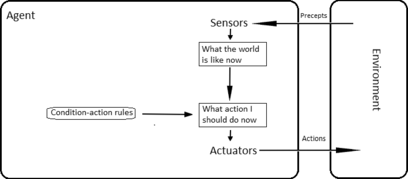
Agent réactif
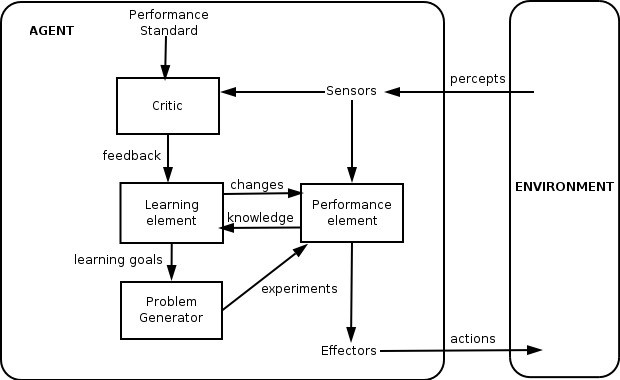
Agent cognitif
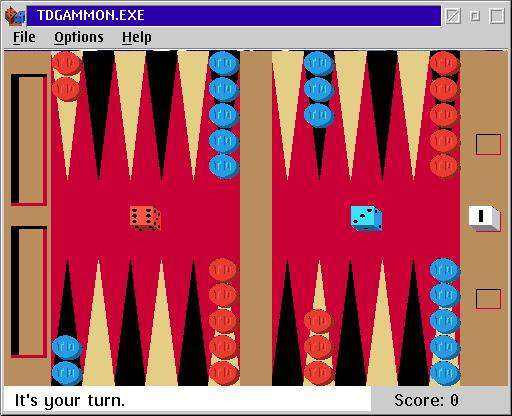
TD-Gammon
Chinook

Kasparov vs. Deep Blue
Logistello
AIBO 1er proto

Time lapse de Roomba
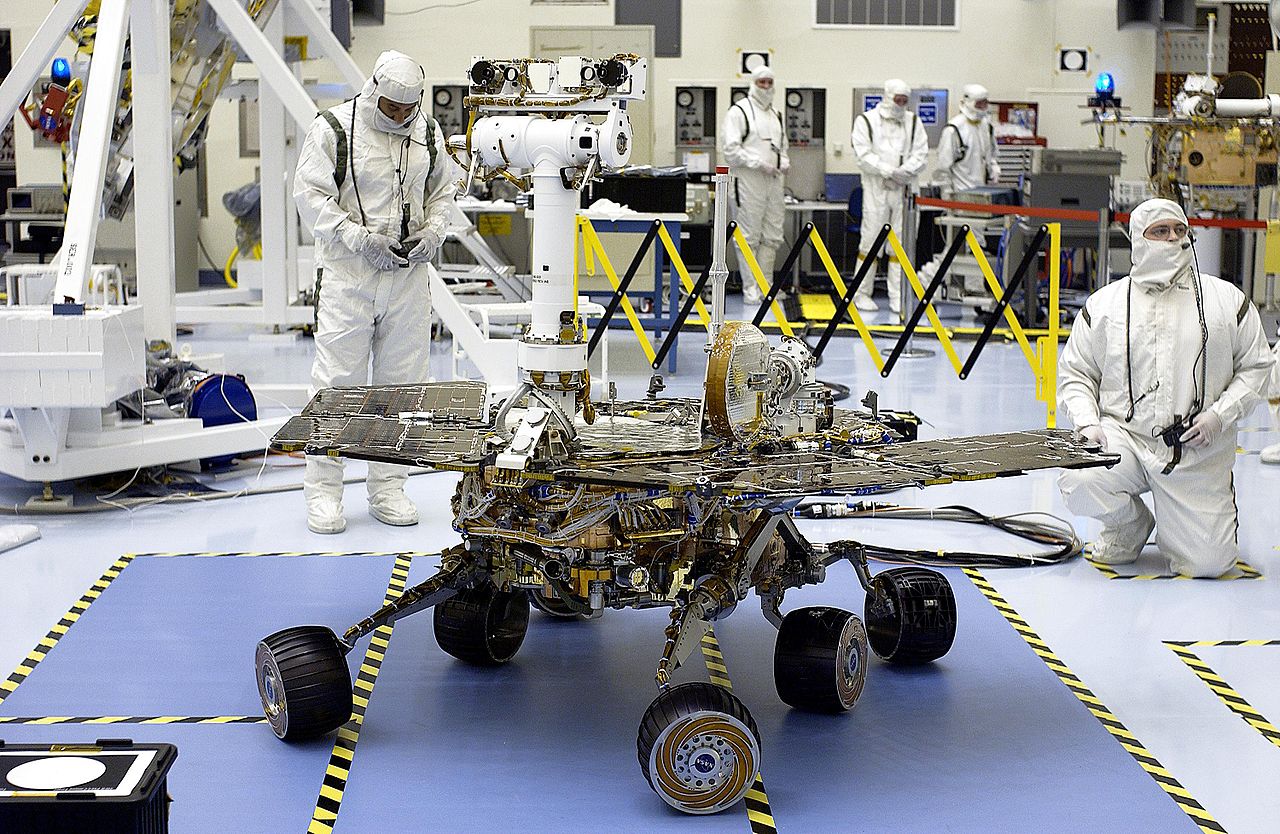
Opportunity

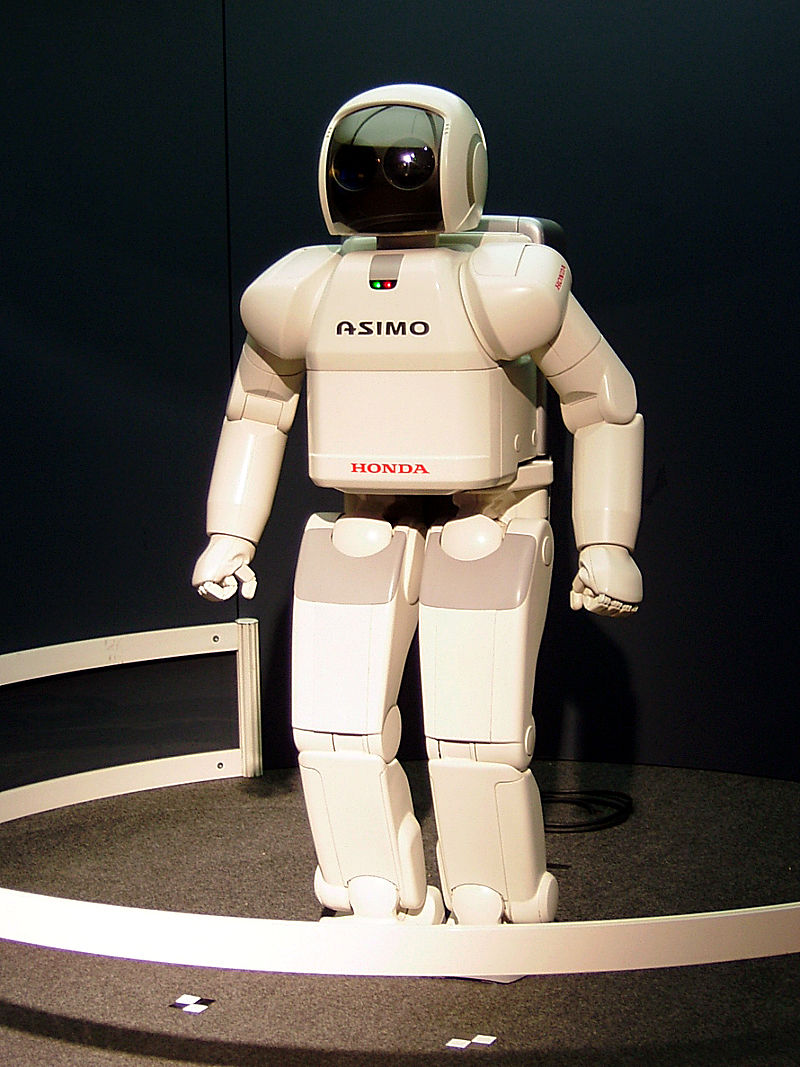
Première version ASIMO
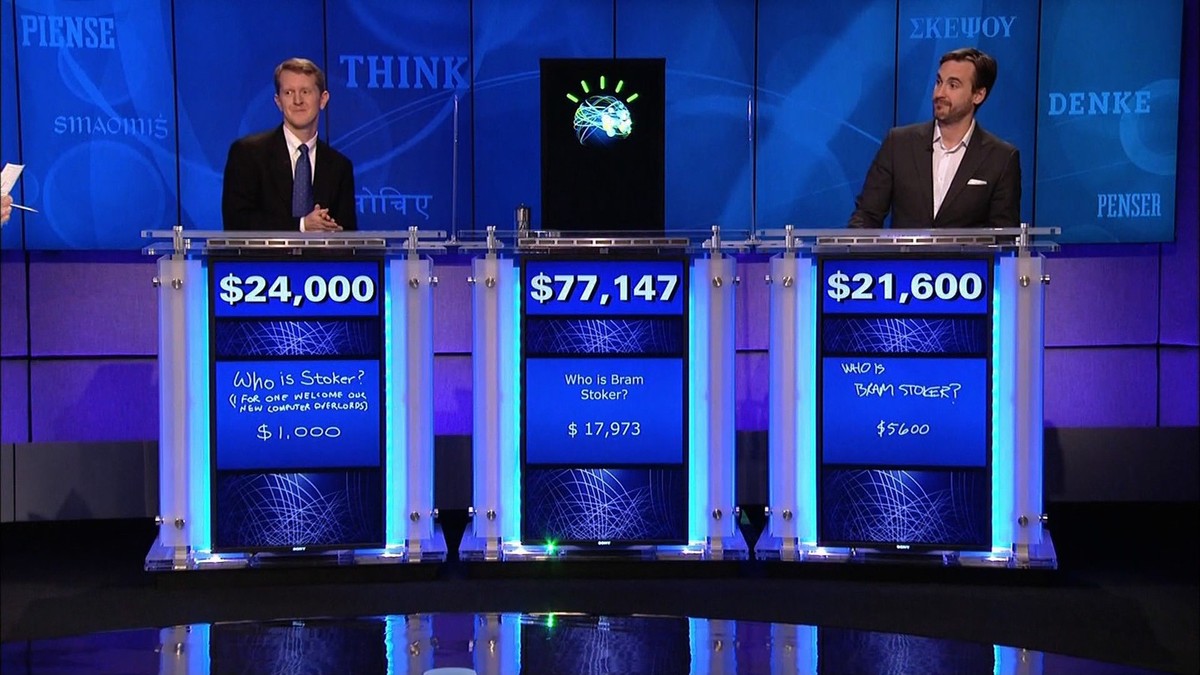
16/02/2011 Jeopardy
Les frames (cadres) - 1975
- Marvin Minski ;
- Part du constat qu'il est difficile de rprésenter des choses simples comme une chaise en logique ;
- Schank parle d'approches alogiques ou brouillonnes ;
- Opposition aux paradigmes dit élégants, comme LISP, PROLOG ...
- Frame : englobe toutes des hypothèses de culture générale d'un thème donné, mais
- Les faits ne sont pas toujours vrais ;
- les déductions à partir de ces faits ne sont pas toutes logiques.
- Origine des langages orientés objets ?
Les informations sont stockées dans un slot. Elles contiennent :
- Les faits ou les données
- Valeurs (facettes)
- Les procédures
IF-NEEDED
IF-ADDED
- Valeurs par défaut
- Pour les données
- Pour les procédures
- D'autres frames
Prix Nobel - 1978
- Hebert Simon ;
- Prix Nobel d'économie ;
- Rationalité limitée ;
- Satisficing : satisfying (satisfaisant) et sufficing (suffisant) ;
- Solution "suffisamment bonne" plutôt "qu'optimale" si l'exploration de toutes les alternatives "coûte trop cher".
Backgammon - 1979
Logique non monotone - 1979
- McDermott, Jon Doyle et John McCarthy ;
- Raisonnement non monotone :
- Tout raisonnement qui permet d'établir des conclusions qui pourront être invalidées en présence de nouvelles informations ;
- Conclusion basées sur à la fois la présence d'information et l'absence ;
- Si je sais A en l'absence de B je peux déduire C.
Stanford Cart - 1979
- Hans Moravec, MIT ;
- Premier véhicule autonome évitant des obstacles.
Machines LISP - 1980
- Initiés par Richard Greenblatt et Thomas Knight en 73 ;
- Noftsker et Greenblatt ;
- Début de la commercialisation ;
Machine de 5ème génération - 1981
- Lampes (1), transistors et diodes (2), circuits intégrés (3), microprocesseurs (4) ;
- Projet Japonais, ordinateur massivement parallèle ;
- Basé sur Prolog ;
- Projet Alvey (GB) en réaction.
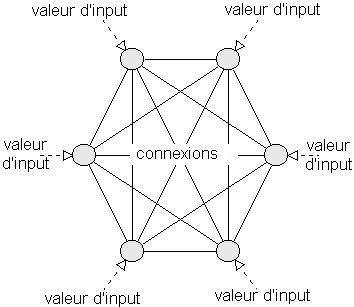
Réseau de neurone de Hopfield - 1982
- Réseau récurrent : systèmes dynamiques constitués de neurones interconnectés interagissant non-linéairement ;
- Asynchrone : un seul neurone est mis à jour à chaque unité de temps ;
- Chaque neurone est connecté à tous les autres ;
- Un neurone ne possède ni couche d’entrée, ni couche de sortie ;
- Les neurones ont un état binaire.
Algèbre d'intervalle - 1983
- Proposés par Allen ;
- Permet des raisonnements spatio-temporels ;
- Définit les relations possibles entre des intervalles de temps ;
- Propose une table de composition.
| x < y | x se déroule avant y |
| x M y | x rencontre y (meet) |
| x O y | x rencontre y (overlap) |
| x S y | x démarre y (start) |
| x D y | x se déroule pendant y (during) |
| x F y | x termine y (finish) |
| x = y | x se déroule avant y |
Les réseaux de neurones reviennent - 1984
- Réseau dynamique, réseau de Hopfield (82) ;
- Carte auto-adaptatrice de Kohonen (84) ;
- Apprentissage supervisé avec l'algorithme de rétropropagation du gardient ;
- On commence à parler d'apprentissage profond (Lecun).
Voiture autonome - 1986
- Ernst Dickmanns (Munich) ;
- Dans des rues vides ;
- 55 mph ~88 km/h.
Société de l'esprit - 1986
- Marvin Minsky ;
- Esprit = architecture d'agents élémentaires, indépendants, mais surtout hiérarchisés ;
- Agents :
- Les plus courants, les K-lines, agent de mémoire à court terme servant à activer d'autres agents ;
- Les nèmes représentent les connaissanxes ;
- Les nomes traitent les connaissances ;
- Les polynèmes permettent d'activer des agents représentant des aspects différents d'un même objet ;
- Les paranomes permettent de manipuler simultanément différents modes de représentations des connaissances. ;
- Les agents de base se combinent pour générer des actions complexes ;
- Cerveau A = esprit, cerveau B contrôle le cerveau A.
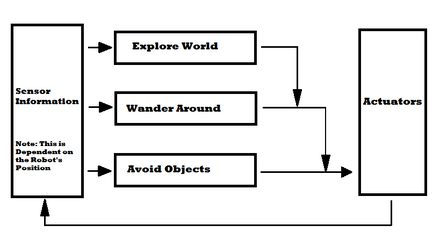
Architecture de subsomption - 1986
- R. Brooks pour de la robotique ;
- Couches hiérarchisées, les plus hautes sont plus prioritaires ;
- Plusieurs modules, chaque module étant responsable de la réalisation d'une tâche simple ;
- Les couches hautes sont les plus abstraites.
Le second hiver de l'IA - 1987
- De 1987 à 1993 ;
- Les machines dédiées sont de moins en moins utilisées ;
- Les systèmes experts ont un coût de maintenance trop élevé ;
- Les objectifs des ordinateurs de 5ème génération ne sont pas atteints.
Le début de la fin pour les humains - 1989
- Sauf pour le Go ;
- Deux orientations :
- Les ordinateurs deviennent plus puissant ;
- Une base de données d'ouverture ;
- Alpha-beta avec une fonction d'évaluation au petit oignon ;
- Une base de données de données de fin de partie ;
- -> Chinook (Dame), Deep Thought fonction d'évaluation apprise(Echec).
- Apprentissage par renforcement ;
- Neurogammon, pas très bon au début !
Agents - 1990
- Entité autonome qui perçoit par capteurs un environnement et agit par des actionneurs sur celui-ci
- Il tend à atteindre un but ;
- Il peut apprendre ou utiliser des connaissances éventuellement ;
- Judea Pearl, Allen Newell pour les formes modernes.
DART - 1991
- Dynamic Analysis and Replanning Tool ;
- Utilise des agents intelligents ;
- Planification dynamique ;
- Utilisé pendant la première guerre du golfe ;
- Logistique militaire.
TD-Gammon - 1992
- Gerald Tesauro (IBM) ;
- Réseau de neurones ;
- Apprentissage par renforcement (Temporal Difference learning) ;
- Apprend en jouant contre des versions antérieures de lui-même ;
- Niveau de jeu légèrement inférieur aux meilleurs joueurs ;
- Trouve des nouvelles stratégies ;
- -> conduit à des progrès dans le jeu !
CHINOOK - 1994
- Jonathan Schaeffer ;
- Jeu de dame ;
- Premier programme informatique à avoir gagné le titre de champion du monde dans une compétition d'un jeu de stratégie ;
- En 90 participe au championnat du monde, 2ème ;
- En 94 il est champion du monde ;
- En 2007 papier "Checkers Is Solved" par Schaeffer
et al ; - Meilleur résultat possible si deux joueurs jouent optimalement = partie nulle.
DEEP BLUE - 1997
- IBM ;
- Deep Thought x Big Blue = Deep Blue ;
- En 96 perd 4 à 2 ;
- En 97 gagne 3,5–2,5 ;
- Evalue 200 millions de positions par seconde ;
- La victoire serait due à un bug !
- Mais en 2006 Deep Fritz vs. Vladimir Kramnik sur un PC 2 Intel Core 2 Duo, 8 millions positions par second, 4 à 2.
Logistello - 1997
- Michael Buro ;
- Bat le champion du monde Takeshi Murakami 6–0.
AIBO - 1999
- AIBO (Artificial Intelligent RoBOt) homonyme de 相棒 du japonais "compagnon", Sony ;
- Robots autonomes et pouvant apprendre en fonction de stimuli provenant de l'environnement ou d'autres AIBO ;
- Abandonné en 2007 par Sony.
L'IA est remplacée par le smart ! - 2000 ...
- L'IA a envahi beaucoup de domaine spécifique ;
- HAL n'est pas là, mais .... ;
- Le smart : smart toys, smartphones, smart cities .... ;
- L'intelligence computationnelle :
- Réseaux de neurones ;
- La logique floue et d'autres ;
- Les algorithmes évolutionnistes (algorithmes génétiques et programmation génétique ;
- L'Intelligence collective. ;
- Les robots arrivent ;
- On commence a parler de singularité.
ROOMBA - 2004
- Socité iRobot ;
- Aspirateur ;
- Se recharge seul ;
- Se déplace et evite les obstacles.
Spirit et Opportunity 2004
- NASA et Caltech ;
- Navigation autonome à la surface de Mars ;
- Amarssissage : 4/01/2004 et 25/01/2004 ;
- 25 mai 2011 ensablage de Spirit ;
- Opportunity roule encore (15/11/16) ;
- Le (27/06/16) 42.85 km.
DARPA Grand Challenge 2004
- DARPA, Defense Advanced Research Projects Agency ;
- 2004 et 2005 Désert des Mojaves, 2007 parcours urbain ;
- Déplacement de manière autonome ;
- Moins de 10 heures pour le parcours ;
- Positionnement GPS et d'autres signaux disponibles pour les civils ;
- Fonctionnement entièrement autonome.
ASIMO - 2005
- Honda ;
- Advanced Step in Innovative Mobility, « ashimo » (des jambes aussi) en japonais ;
- Mémoire ;
- Capacités de calcul ;
- Identification des objets mobiles ;
- Identification des gestes ;
- Possibilité de serrer la main d'une personne quand celle-ci le sollicite, tout en gérant sa force ;
- Reconnaissance vocale (possibilité de distinguer les voix et les bruits parasites) ;
- Reconnaissance des visages et des êtres humains (suivre une personne, saluer une personne qui s'approche, s'adresser à une personne par son nom) ;
Google car - 2009
- Sebastian Thrun, père de Google Street View ;
- Puis Chris Urmson, vainqueur challenge DARPA en 2007 (Carnegie Mellon) ;
- Deux types de véhicules autonomes :
- Des véhicules de série modifiés par Google ;
- Des véhicules électriques et autonomes entièrement conçus par Google ;
WATSON - 2011
- IBM - DeepQA research project ;
- Répondre à des questions formulées en langage naturel ;
- Remporte le jeu Jeopardy, face à 2 champions (+ 100 victoires) ;
- "Comprend" l’énoncé des questions ;
- Buzze pour prendre la main ;
- Trouve les réponses en quelques secondes ;
- Choisit le thème et la mise ;
- Problème ouvert contrairement au échec !! ;
- Passe t-il le test de Turing ?
Assistant personnel intelligent - 2011
- Reconnaissance vocale ;
- Traitement du langage naturel ;
- Synthèse vocale ;
- Siri (Apple), Google Now, Cortana (Microsoft) ;
- Vers la vie digitale ??
Autonomous Weapons - 2015
Deep Mind DQN - 2015
- Google ;
- Réseau de neurone profond et apprentissage par renforcement ;
- Jeu sur Atari ~ 1980, Pong, pacman...
- Algorithme capable d’apprendre directement de ses expériences ;
- Très bons résultats, mais encore des pb sur les planifications longues.
Deep Mind AlphaGo - 2015
- Jeu de Go ;
- Gagne contre le champion d'Europe ;
- Basé sur un arbre de recherche de Monté-carlo ;
- Utilise un réseau de neurone profond et de l'apprentissage par renforcement ;
- Apprendre à explorer les parties intéressantes de l'arbre ;
- Apprendre à évaluer le l'état du goban.
Deep Mind AlphaGo - 2016
- Bat Lee Sedol ;
- Triomphe de l'apprentissage profond ?